

本系列代码托管于:https://github.com/chintsan-code/opencv4-tutorials
本篇使用的项目为:convolution
#include <opencv2/opencv.hpp>
#include <iostream>
using namespace cv;
using namespace std;
int main(int argc, const char** argv) {
Mat src = imread("../sample/example.png");
if (src.empty()) {
cout << "could not load image..." << endl;
return -1;
}
namedWindow("input", WINDOW_AUTOSIZE);
imshow("input", src);
int h = src.rows;
int w = src.cols;
Mat result = src.clone();
// 双层for循环做3*3卷积,实现均值滤波。用指针会更快一点
for (int row = 1; row < h - 1; row++) {
for (int col = 1; col < w - 1; col++) {
// 3x3卷积核
int sb = src.at<Vec3b>(row, col)[0] + src.at<Vec3b>(row - 1, col - 1)[0] + src.at<Vec3b>(row - 1, col)[0] +
src.at<Vec3b>(row - 1, col + 1)[0] + src.at<Vec3b>(row, col - 1)[0] + src.at<Vec3b>(row, col + 1)[0] +
src.at<Vec3b>(row + 1, col - 1)[0] + src.at<Vec3b>(row + 1, col)[0] + src.at<Vec3b>(row + 1, col + 1)[0];
int sg = src.at<Vec3b>(row, col)[1] + src.at<Vec3b>(row - 1, col - 1)[1] + src.at<Vec3b>(row - 1, col)[1] +
src.at<Vec3b>(row - 1, col + 1)[1] + src.at<Vec3b>(row, col - 1)[1] + src.at<Vec3b>(row, col + 1)[1] +
src.at<Vec3b>(row + 1, col - 1)[1] + src.at<Vec3b>(row + 1, col)[1] + src.at<Vec3b>(row + 1, col + 1)[1];
int sr = src.at<Vec3b>(row, col)[2] + src.at<Vec3b>(row - 1, col - 1)[2] + src.at<Vec3b>(row - 1, col)[2] +
src.at<Vec3b>(row - 1, col + 1)[2] + src.at<Vec3b>(row, col - 1)[2] + src.at<Vec3b>(row, col + 1)[2] +
src.at<Vec3b>(row + 1, col - 1)[2] + src.at<Vec3b>(row + 1, col)[2] + src.at<Vec3b>(row + 1, col + 1)[2];
result.at<Vec3b>(row, col)[0] = sb / 9;
result.at<Vec3b>(row, col)[1] = sg / 9;
result.at<Vec3b>(row, col)[2] = sr / 9;
}
}
imshow("conv-demo", result);
Mat dst;
// 相当于和下面的卷积核做卷积操作:
// 1 1 1
// 1 1 1
// 1 1 1
blur(src, dst, Size(3, 3), Point(-1, -1), BORDER_DEFAULT);
imshow("blur-demo", dst);
// 边缘填充
int border = 8;
Mat border_m;
copyMakeBorder(src, border_m, border, border, border, border, BORDER_WRAP, Scalar(0, 0, 255));
imshow("border fill demo", border_m);
waitKey(0);
destroyAllWindows();
return 0;
}
blur:均值滤波
void blur( InputArray src, OutputArray dst, Size ksize, Point anchor = Point(-1,-1), int borderType = BORDER_DEFAULT );- src:输入图像,可以为任意通道,当进行滤波时,各通道的处理是独立的。但是深度只能为CV_8U, CV_16U, CV_16S, CV_32F或CV_64F
- dst:输出图像,与src具有相同的尺寸和类型
- ksize:卷积核尺寸
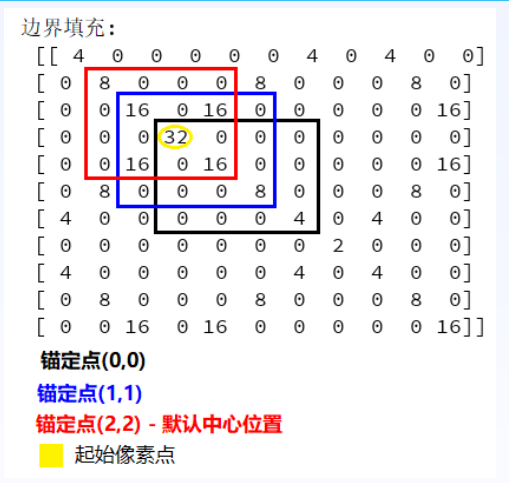
- anchor:锚点,将卷积结果赋值给哪个位置的像素。(-1, -1)代表卷积核中心位置
- borderType:图像边缘处理方式。注意是在卷积之前进行填充
- BORDER_CONSTANT:用指定像素值填充。iiiiii|abcdefgh|iiiiiii(用i填充)。在此不可用。
- BORDER_REPLICATE:用边缘像素填充。aaaaaa|abcdefgh|hhhhhhh
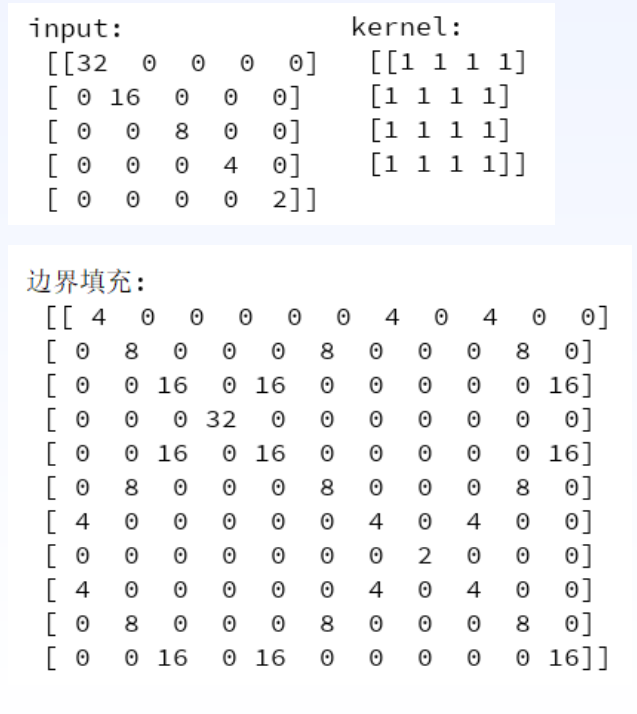
- BORDER_WRAP:包裹填充。cdefgh|abcdefgh|abcdefg。左填到右,右填到左,上填到下,下填到上
- BORDER_REFLECT_101。以边界为对称轴反射复制像素。gfedcb|abcdefgh|gfedcba
- BORDER_DEFAULT,即BORDER_REFLECT_101
关于锚点anchor:
关于边缘处理方式borderType,以BORDER_REFLECT_101为例:
copyMakeBorder:边缘填充函数
void copyMakeBorder(InputArray src, OutputArray dst, int top, int bottom, int left, int right, int borderType, const Scalar& value = Scalar() );- src:输入图像
- dst:输出图像。与src具有相同的类型,并且尺寸应该等于
Size(src.cols+left+right,src.rows+top+bottom) - top:在图像上边缘填充多少个像素
- bottom:在图像下边缘填充多少个像素
- left:在图像左边缘填充多少个像素
- right:在图像右边缘填充多少个像素
- borderType:图像边缘处理方式
- value: 填充的像素值。当borderType为BORDER_CONSTANT时可用








评论 (0)